
Stock Code 002434


 WeChat
WeChat

Stock Code
002434
MENU
-
About WLY
-
Products Center
-
Service Center
-
News Center
-
Investor Relations
-
Join us

 Collection
Collection Service and Support
Service and Support Share
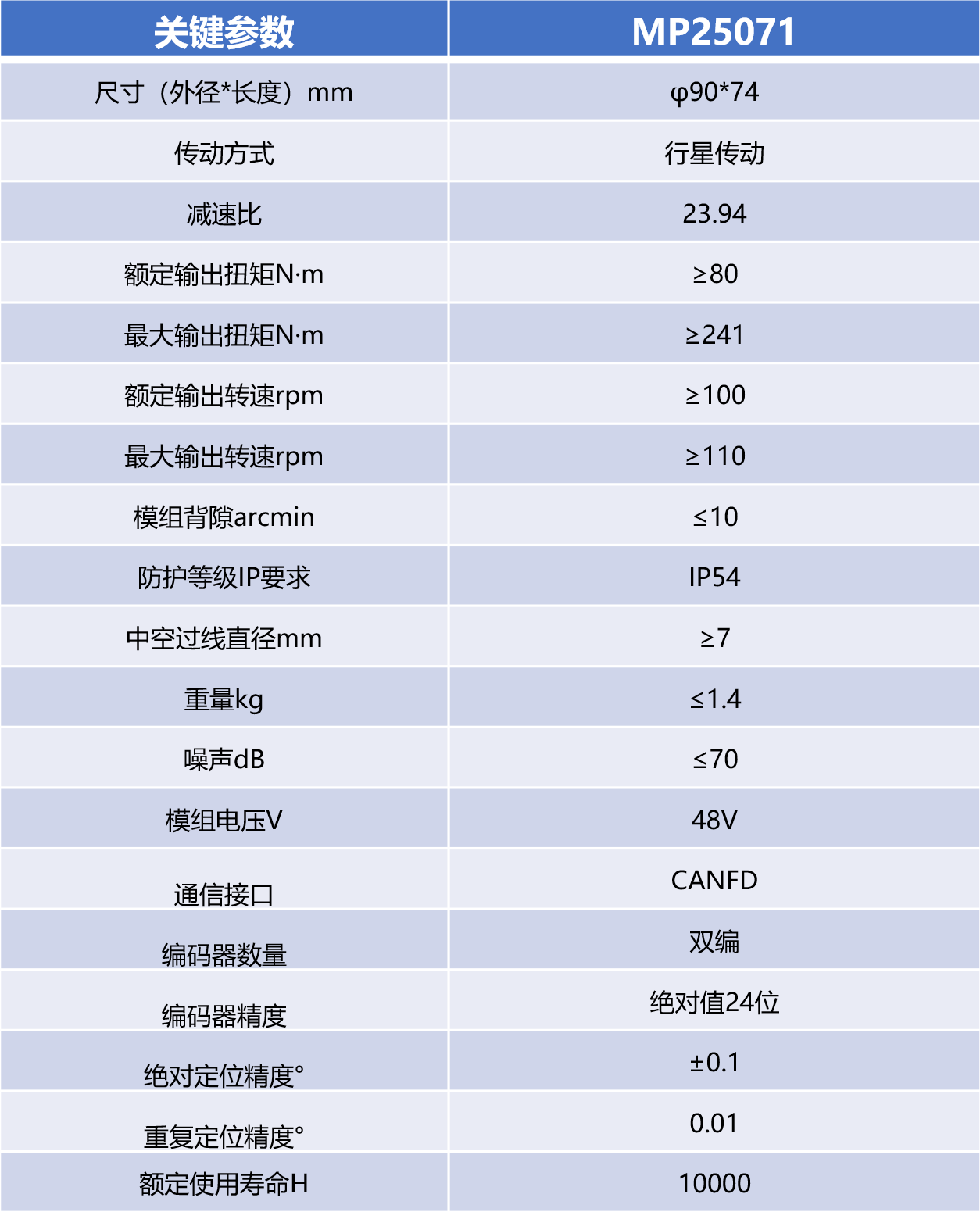
Share MP25071
MP25071  MP25072
MP25072  Product Features
Product Features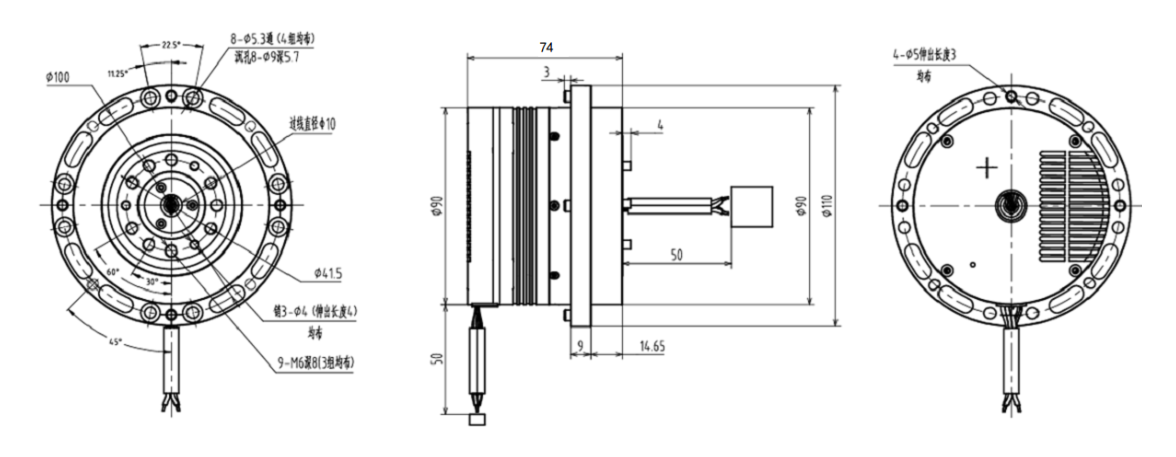
 For humanoid robots and medium-to-large robotic dogs: hip, knee, shoulder, and waist joints, etc.
For humanoid robots and medium-to-large robotic dogs: hip, knee, shoulder, and waist joints, etc.
