Extreme miniaturized torque density: Achieves 96 N·m peak torque in a smaller volume (80×58 mm), suitable for lightweight, heavy-load scenarios (e.g., agile movements of humanoid robots);
Low backlash and high precision: Backlash < 10 arcmin, repeat positioning accuracy < 0.6 arcmin, balancing "transmission smoothness" and "motion accuracy" (e.g., fine gait adjustment);
Low noise and low temperature rise experience: Uses high-thermal-conductivity potting, segmented direct winding of stator, and other technologies to solve the problems of easy heat generation and high noise in small joints;
Dedicated lower-limb adaptation: Designed specifically for waist/hip joints, providing impact resistance while meeting the dual requirements of flexibility and heavy load for robots.



 WeChat
WeChat


 Collection
Collection Service and Support
Service and Support Share
Share MP25072
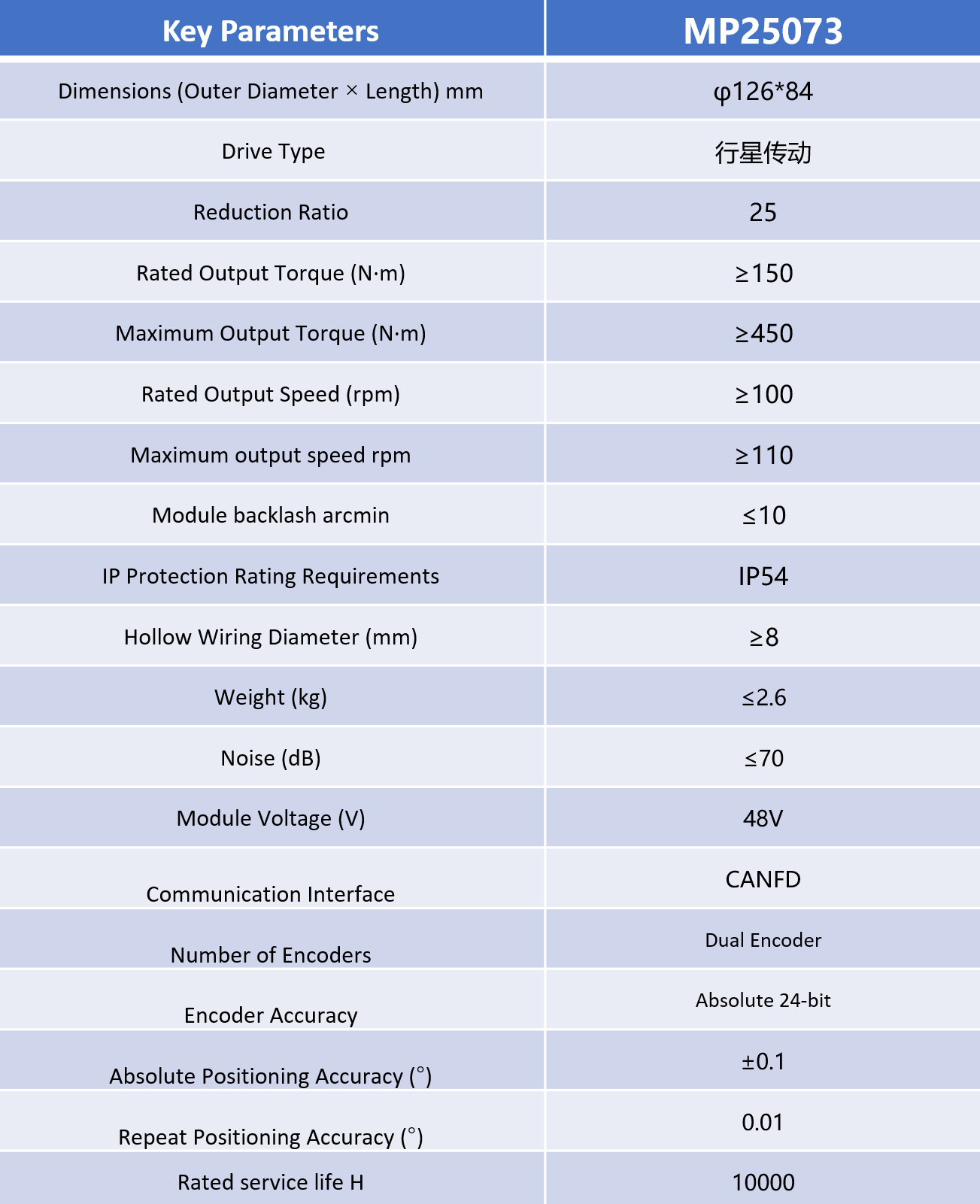
MP25072  MP25073
MP25073  MH25094
MH25094  Product Features
Product Features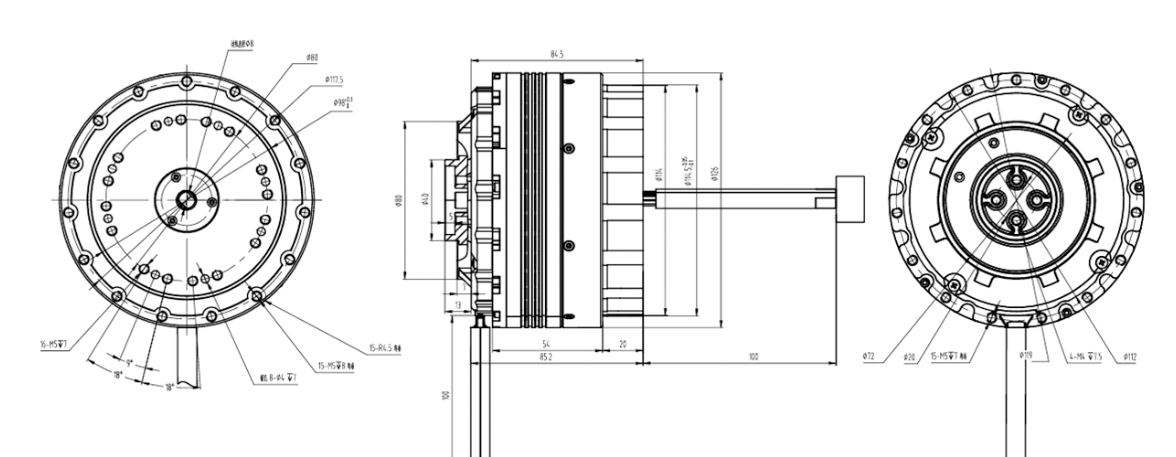
 Humanoid robots, and the hip, knee, shoulder, and waist joints of medium-to-large robotic dogs, etc.
Humanoid robots, and the hip, knee, shoulder, and waist joints of medium-to-large robotic dogs, etc.
